1 实例
对于一些类来说只有一个实例是很重要的。如,仅有一个文件系统,一个窗口管理者。一个数字滤波器只有一个模数转换器。
那么我们如何确保一个类只有一个实例,而且这个实例能容易的访问?
- 全局变量。一个全局变量能使对象任意访问,但是它并不能防止你实例化多个对象。
- 单例模式。更好方法是让类自己负责保存它唯一的实例。这个类能保证没有其他实例被创建(通过截断创建新对象的请求),而且它提供获取这个实例的方法。
2 单例模式(Singleton)
2.1 传统方式
1: //header file 2: class Singleton { 3: public: 4: static Singleton* instance(); 5: private: 6: static Singleton* pInstance; 7: virtual ~Singleton(); 8: }; 9: 10: //cc file 11: Singleton* Singleton::pInstance = NULL; 12: 13: Singleton::~Singleton() { 14: } 15: 16: Singleton* Singleton::instance() { 17: if(pInstance == NULL) { 18: pInstance = new Singleton(); 19: } 20: return pInstance; 21: }
在单线程环境中,除了中断会有问题,其他基本没问题。
但是,这个实现在多线程环境下是不可靠的。
- 假如线程 A 进入
instance函数,执行到17 行,然后被挂起。在这个挂起点,它刚刚判断出pInstance是null的。 - 线程 B 现在进入
instance然后执行17 行,它发现pInstance是null的,所以它运行18 行来创建pInstance指向的Singleton。然后它把pInstance返回给instance的调用者。 - 不久后,线程 A 被允许继续运行,它立即运行
18 行,创建另外一个Singleton并使pInstance指向它。
明显这违背了单例的概念,因为现在有两个 Singleton 的对象。
2.2 线程安全的传统方式
使得传统方式线程安全,只要在判断 pInstance 前获取锁就行。
Singleton* Singleton::instance() { Lock lock; // acquire lock (params omitted for simplicity) if(pInstance == NULL) { pInstance = new Singleton(); } return pInstance; } // release lock (via Lock destructor)
但是这个方法开销比较大。每次获取 Singleton 都要获取一个锁,但是实际上,我们只有当初始化 pInstance 时才需要一个锁。也就是只发生在第一次调用 instance 时。如果在一个程序运行时, instance 被调用了 n 次,我们只需要锁在第一次调用时。当我们知道那 n-1 次锁是没必要的,那为什么要负担那 n 次去获取锁?DCLP 被设计出来防止这。
2.3 The Double-Checked Locking Pattern1
2.3.1 DCLP
DCLP 的关键点是发现,大多数 instance 的调用将看到 pInstance 是非空的,因此根本没必要去尝试初始化它。因此,DCLP 判断 pInstance 是否为空在尝试获取锁前。只有当判断成功( pInstance 还没有被初始化)才去获取锁,然后之后这个判断在此进行一次确保 pInstance 是仍然空的。(所以名字叫双重检查锁)。第二个检查是有必要的,因为从上可以看到,另外的线程可能碰巧初始化了 pInstance 在 pInstance 被第一次判断和获取锁之间。
DCLP 的实现:
Singleton* Singleton::instance() { if(pInstance == 0) { // 1st test Lock lock; if(pInstance == 0) { // 2nd test pInstance =newSingleton; } } return pInstance; }
《Double-Checked Locking》1文章还进一步讨论了很多其他一些实现问题( volatile 的重要性,多线程系统中的缓存问题等),但是没有提到更基础的问题,就是确保 DCLP 的机器指令以一定的顺序执行。《C++ and the Perils
of Double-Checked Locking》2 详细的讲述了这个问题,在以下引用它的内容来说明。
2.3.2 指令顺序
考虑 pInstance 初始化行:
pInstance = new Singleton;
这句话导致 3 件事情发生:
Step 1:分配内存为 Singleton 对象
Step 2:在分配的内存里创建 Singleton 的对象
Step 3:使 pInstance 指向分配的内存
最重要的关键发现是编译器并不限制要按这样的顺序执行。特别,编译器时常允许交换 Step 2 和 3。现在先看如果这样交换后发生什么。
看如下代码,扩展 pInstance 的初始化行成 3 个连续的上面提到的任务,也就是 step 1(内存分配)和 3( pInstance 赋值)在 step 2( Singleton 创建)之前。这是编译器会把上面 DCLP 的代码转换成如下的代码。
Singleton* Singleton::instance() { if(pInstance == 0) { Lock lock; if(pInstance == 0) { pInstance = // Step 3 operator new(sizeof(Singleton));// Step 1 new(pInstance) Singleton; // Step 2 } } return pInstance; }
考虑如上的顺序,考虑如下顺序的事件:
- 线程 A 进入
instance,进行pInstance的第一次判断,获得锁,执行 step 1 和 3。然后它被挂起。在这点pInstance是非空的,但是在内存中并没有创建pInstance指向的Singleton的对象。 - 线程 B 进入
instance,得出pInstance是非空的,把它返回给instance的调用者。然后调用者解指针来访问 未创建的Singleton。
DCLP 能用仅当 step1 和 2 在 step 3 之前完成,但是没有办法表达这一约束在 C 或 C++ 中。C 或 C++语言没有线程概念,所以编译器不用担心破坏线程类程序当它们被优化时。那么如何用 C 或 C++写多线程的程序呢?使用系统级为了这目的而定义的库,如 Posix threads (pthreads)3。
2.3.3 关键字 volatile
想要特殊的指令顺序使得许多人想关键字 volatile 是否能起到帮助多线程,特别是 DCLP。
pInstance 需要被声明为 volatile 的,而且对象 Singleton 自己也必须是 volatile 。
接下来看仅仅 pInstance 被声明为 volatile 是不够的。考虑如下代码:
class Singleton { public: static Singleton* instance(); ... private: static Singleton* pInstance;// volatile added int x; Singleton() : x(5) {} }; // from the implementation file Singleton* Singleton::pInstance = 0; Singleton* Singleton::instance() { if (pInstance == 0) { Lock lock; if (pInstance == 0) { Singleton* temp = new Singleton;// volatile added pInstance = temp; } } return pInstance; }
构造函数内嵌后,代码如下:
if (pInstance == 0) { Lock lock; if (pInstance == 0) { Singleton* volatile temp = static_cast<Singleton*>(operator new(sizeof(Singleton))); temp->x = 5; // inlined Singleton constructor pInstance = temp; } }
尽管 temp 是 volatile 的,但是 *temp 不是,也就是意味着
temp->x 也不是。因为我们已经明白赋值给一个 non-volatile 的数据可能被重新排序,所以很容易的得出编译器能重新排序 temp->x 的赋值和赋值给
pInstance 。如果编译器这么做了,那么 pInstance 就会在数据初始化前就得到赋值,再次导致另外一个线程可能读取到一个未被初始化的 x 。
针对这一症结,把 *pInstance 和 pInstance 自身一样也 volatile 化。
class Singleton { public: static volatile Singleton* volatile instance(); ... private: // one more volatile added static Singleton* volatile pInstance; }; // from the implementation file volatile Singleton* volatile Singleton::pInstance = 0; volatile Singleton* volatile Singleton::instance() { if (pInstance == 0) { Lock lock; if (pInstance == 0) { // one more volatile added volatile Singleton* volatile temp = new Singleton; pInstance = temp; } } return pInstance; }
我们希望上面布满 volatile 化的代码能被语言的标准保证正确的运行在多线程的环境下,但是它可能如下两种原因失败。
- C++的在可观察行为的标准规范仅仅只针对标准定义的抽象机器,这台抽象机器并没有多个线程运行的概念。所以,尽管标准防止编译器去乱序在一个线程内的对
volatile数据的读写,但是它并没有规范针对在线程间的乱序。所以,实际上,许多编译器可能从上面的代码生成线程不安全的代码。 - 就如
const定义的对象直到构造函数运行结束才成为const,volatile声明的对象成为volatile只当从它们的构造函数返回。如下代码中:volatile Singleton* volatile temp = new volatile Singleton;
这个被创建的对象成为
volatile仅当这句表达式new volatile Singleton;运行完成,也就意味着,我们回到上面的情景,内存分配和对象赋值可能被调换运行顺序。
第二个问题可以被笨拙地解决。只要在 Singleton 的构造函数中,我们强制把每个 Singleton 的数据成员都暂时 volatile 化,从而防止指令来完成这一系列的初始化。如下的例子:
Singleton() { static_cast<volatile int&>(x) = 5;// note cast to volatile } class Singleton { public: static Singleton* instance(); ... private: static Singleton* volatile pInstance; int x; ... }; Singleton* Singleton::instance() { if (pInstance == 0) { Lock lock; if (pInstance == 0) { Singleton* volatile temp = static_cast<Singleton*>(operator new(sizeof(Singleton))); static_cast<volatile int&>(temp->x) = 5; pInstance = temp; } } }
但是,还是没有解决第一个问题。
2.4 实际的使用
2.4.1 回到线程安全的传统方式
使用之前的线程安全的传统方式,使用来自线程库的锁来确保线程安全的 Singleton 初始化,然后做时间开销的统计看是否需要担心。
这里用 pthread 库,写出完整的代码,代码实例在这里。
- 首先封装
pthread_mutex_tclass PThreadMutex { public: explicit PThreadMutex(base::LinkerInitialized) { pthread_mutex_init(&mutex_, NULL); } PThreadMutex() { pthread_mutex_init(&mutex_, NULL); } ~PThreadMutex() { pthread_mutex_destroy(&mutex_); } void Lock() { int rc = pthread_mutex_lock(&mutex_); assert(rc == 0); } void Unlock() { int rc = pthread_mutex_unlock(&mutex_); assert(rc == 0); } private: pthread_mutex_t mutex_; DISALLOW_COPY_AND_ASSIGN(PThreadMutex); }; typedef PThreadMutex Mutex;
- 继承封装成一个
MutexLockclass MutexLock { public: explicit MutexLock(Mutex* mutex) : mutex_(mutex) { mutex->Lock(); } ~MutexLock() { mutex_->Unlock(); } private: Mutex* mutex_; DISALLOW_COPY_AND_ASSIGN(MutexLock); };
- 线程安全
Singleton主函数Singleton* Singleton::instance() { cout << "call the singleton instance" << endl; static Mutex mutex_(base::LINKER_INITIALIZED); MutexLock l(&mutex_); if (pInstance == NULL) { cout << "In the Lock" << endl; pInstance = new Singleton(); } return pInstance; } // release MutexLock (via MutexLock destructor)
然后在每个需要要到访问这个单例对象的线程开始,调用 instance ,在本地线程内存缓存返回的指针,如下:
Singleton* const instance = Singleton::instance(); // cache instance pointer instance->transmogrify(); instance->metamorphose(); instance->transmute();
2.4.2 提前初始化
另一种安全的做法是提前初始化,也就是初始化单例资源在程序最开始运行时。因为多线程程序基本以单线程开始,这个方法可以把一些对象初始化放到单线程的那部分代码,来达到消除需要担心在初始化时的线程问题。
2.4.3 DCLP 在 C++11 中得到修复
Double-Checked Locking Works in C++11详细分析了如何用 C++11 来实现可移植性的安全 DCLP.
3 总结
3.1 单例模式(Singleton)结构
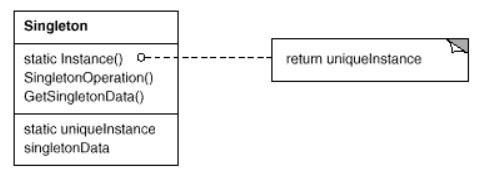
3.2 组成
- 单例
- 定义一个实例化的操作来让客户能访问它唯一的实例。实例化就是一个函数操作(静态函数在 C++里)。
- 对创建自己唯一的实例负责。
3.3 目的
确保一个类只有一个实例,并且提供一个访问它的全局点。
3.4 应用场景
- 必须仅有一个类的实例,而且它需要从一个明了的地方被客户访问到。
- 当这个唯一的实例应该能被子类扩展,而且客户应该无需更改它们的代码直接使用扩展的实例。