Overview
上一篇浅谈 C++ Multithreading Programming主要介绍时下规范好的 C++使用 Pthread 库和 Boost Thread 库实现 C++多线程编程.这里主要谈谈正在规范的 C++11 引入的 Thread 库和 Atomic 库,终于自带的 C++库能支持高效并可移植的 Multithreading 编程.分为 2 篇,这里先谈谈 C++11 的Thread 的库 (并包含对 C 的支持), 后一篇谈谈 C++11 的Atomic 操作的库.
C++11(之前被成为 C++0x)是编程语言 C++最新版本的标准.它由 ISO 在 2011 年 8 月 12 日被批准替代C++03. C++11 标准正在规范中,从ISO 页面 可以知道如何获得进行中的草稿:
所以本文:
- 标准内容主要参考如上的 N3690 版本的 C++11 标准.
- 使用的编译器是 GCC4.8,关于 GCC4.8 支持 C+11 的情况.
- 源代码之类主要参考cplusplus 和 cppreference.
更多有关 C++参考最后的其他资料.
Compile
GCC 编译支持 C++11,使用编译选项 -std=c++11 或 -std=gnu++11, 前者关闭
GNU 扩张支持.并加上 -pthread 选项.
g++ program.o -o program -std=c++11 -pthread
如果漏掉 -phtread 选项,编译能通过,当运行出现如下错误:
terminate called after throwing an instance of 'std::system_error'
what(): Enable multithreading to use std::thread: Operation not permitted
Threads
<thread> 概要
头文件是 <thread>, 分为两部分: thread 类和在 namespace
this_thread 用来管理当前 thread 的函数.具体见之后的Header <thread> synopsis.
thread::id 类
thread::id 类型的对象为每个执行的线程提供唯一的标识,并为所有并不表示线程执行(默认构造的线程对象)的所有线程对象提供一个唯一的值.
thread::id 类没有特别的东西,主要提供方便比较或打印等运算符重载.
namespace std { class thread::id { public: id() noexcept; }; bool operator==(thread::id x, thread::id y) noexcept; bool operator!=(thread::id x, thread::id y) noexcept; bool operator<(thread::id x, thread::id y) noexcept; bool operator<=(thread::id x, thread::id y) noexcept; bool operator>(thread::id x, thread::id y) noexcept; bool operator>=(thread::id x, thread::id y) noexcept; template<class charT, class traits> basic_ostream<charT, traits>& operator<< (basic_ostream<charT, traits>& out, thread::id id); // Hash support template <class T> struct hash; template <typename T> <> struct hash<thread::id>; }
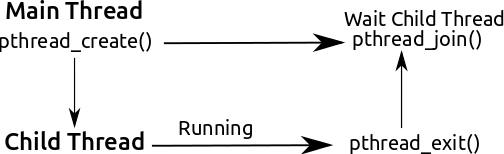
thread 类
namespace std { class thread { public: // types: class id; typedef implementation-defined native_handle_type; // See 30.2.3 // construct/copy/destroy: thread() noexcept; template <class F, class ...Args> explicit thread(F&& f, Args&&... args); ~thread(); thread(const thread&) = delete; thread(thread&&) noexcept; thread& operator=(const thread&) = delete; thread& operator=(thread&&) noexcept; // members: void swap(thread&) noexcept; bool joinable() const noexcept; void join(); void detach(); id get_id() const noexcept; native_handle_type native_handle(); // See 30.2.3 // static members: static unsigned hardware_concurrency() noexcept; }; }
Constructs a thread object
从如上的 thread 类知道, 构造 thread 对象:
- 默认构造构造一个线程对象,但并不代表任何执行线程.
- 移动构造从其他线程构造一个 thread 对象,并设置其他线程为默认构造状态.
- 初始化构造创建一个新的 thread 对象并把它与执行线程相关联.复制/移动所有参数
args..到 thread 可访问的内存通过如下函数:
template <class T> typename decay<T>::type decay_copy(T&& v) { return std::forward<T>(v); }
求值和复制/移动参数过程丢出的任何 exceptions 仅在当前线程丢出,不在新线程中.
- 复制构造复制构造被删除.线程不可被复制.
实例:
#include <iostream> // NOLINT #include <utility> #include <thread> #include <functional> using std::cout; using std::endl; void Thread1Fun(int n) { for (int i = 0; i < n; ++i) { cout << "Thread 1 executing" << endl; } } void Thread2Fun(const int& n) { for (int i = 0; i < n; ++i) { std::cout << "Thread 2 executing\n"; } } int main() { const int kLoops = 5; std::thread t1; // t1 is not a thread std::thread t2(Thread1Fun, kLoops + 1); // pass by value std::thread t3(Thread2Fun, std::ref(kLoops)); // pass by reference std::thread t4(std::move(t3)); // t4 is now running f2(). t3 is no longer a thread t2.join(); t4.join(); return 0; }
joinable
用来检查一个线程对象是否是正在执行的线程.若是,返回 true. 所以默认构造 thread 对象是不可 joinable.
实例:
#include <iostream> // NOLINT #include <thread> #include <chrono> using std::cout; using std::endl; void ThreadFun() { std::this_thread::sleep_for(std::chrono::seconds(1)); } int main() { std::thread t; cout << "default construct, joinable: " << t.joinable() << endl; t = std::thread(ThreadFun); cout << "initial construct, joinable: " << t.joinable() << endl; t.join(); return 0; }
结果:
default construct, joinable: 0 initial construct, joinable: 1
get_id
返回 thread 对象的 std::thread::id 值.
实例:
#include <iostream> // NOLINT #include <thread> #include <chrono> using std::cout; using std::endl; void ThreadFun() { std::this_thread::sleep_for(std::chrono::seconds(1)); } int main() { std::thread t1(ThreadFun); std::thread::id id_t1 = t1.get_id(); cout << "thread1's id: " << id_t1 << endl; t1.join(); return 0; }
native_handle
这个函数是 implementation-defined. 它允许提供底层实现细节的访问.但实际使用它是 non-portable.
实例: 使用 native_handle 打开在 POSIX 系统上 C++线程的实时调度.
#include <pthread.h> #include <thread> #include <mutex> #include <iostream> // NOLINT #include <chrono> #include <cstring> using std::cout; using std::endl; std::mutex iomutex; void ThreadFun(int thread_id) { std::this_thread::sleep_for(std::chrono::seconds(1)); sched_param sch; int policy; pthread_getschedparam(pthread_self(), &policy, &sch); std::lock_guard<std::mutex> lk(iomutex); cout << "Thread " << thread_id << " is executing at priority " << sch.sched_priority << endl; } int main() { std::thread t1(ThreadFun, 1), t2(ThreadFun, 2); sched_param sch; int policy; pthread_getschedparam(t1.native_handle(), &policy, &sch); sch.sched_priority = 20; if (pthread_setschedparam(t1.native_handle(), SCHED_FIFO, &sch)) { cout << "Failed to setschedparam: " << std::strerror(errno) << endl; } t1.join(); t2.join(); return 0; }
使用 Super User,结果:
$ sudo ./test Thread 1 is executing at priority 20 Thread 2 is executing at priority 0
hardware_concurrency (static)
返回硬件支持的 thread 数.这个值仅作为参考.如果这个值不可计算或没有很多的定义,那么实现返回 0.
#include <iostream> // NOLINT #include <thread> int main() { unsigned int num = std::thread::hardware_concurrency(); std::cout << num << " concurrent threads are supported." << std::endl; }
swap
swap 操作用来交换 2 个线程对象的底层句柄.有 2 种可选,thread 类的成员函数和在 std 下的全局函数.
实例:
#include <iostream> // NOLINT #include <thread> #include <chrono> void Thread1Fun() { std::this_thread::sleep_for(std::chrono::seconds(1)); } void Thread2Fun() { std::this_thread::sleep_for(std::chrono::seconds(1)); } int main() { std::thread t1(Thread1Fun); std::thread t2(Thread2Fun); std::cout << "thread 1 id: " << t1.get_id() << std::endl; std::cout << "thread 2 id: " << t2.get_id() << std::endl; std::swap(t1, t2); std::cout << "after std::swap(t1, t2):" << std::endl; std::cout << "thread 1 id: " << t1.get_id() << std::endl; std::cout << "thread 2 id: " << t2.get_id() << std::endl; t1.swap(t2); std::cout << "after t1.swap(t2):" << std::endl; std::cout << "thread 1 id: " << t1.get_id() << std::endl; std::cout << "thread 2 id: " << t2.get_id() << std::endl; t1.join(); t2.join(); return 0; }
管理当前 thread 的函数
在 thread 的头文件中,加了一个新的 namespace this_thread 用来包含一些管理操作当前 thread 的一些函数.
void yield();
重新调度线程的执行,让其他线程运行.具体行为依赖于实现,与 OS 的调度机制有关.
std::thread::id get_id();
返回当前线程的 thread::id 类型的对象.
template< class Rep, class Period > void sleep_for( const std::chrono::duration<Rep, Period>& sleep_duration );
阻塞当前线程的执行至少相对时间 sleep_duration.
template< class Clock, class Duration > void sleep_until( const std::chrono::time_point<Clock,Duration>& sleep_time );
阻塞当前线程的执行直到绝对时间 sleep_time 到达.
实例:
#include <iostream> // NOLINT #include <thread> #include <chrono> #include <mutex> #include <atomic> #include <ctime> using std::cout; using std::endl; using std::chrono::system_clock; std::atomic<bool> ready(false); void Thread1Fun() { while (!ready) { std::this_thread::yield(); } std::thread::id id = std::this_thread::get_id(); cout << "thread " << id << "go to sleep" << endl; std::this_thread::sleep_for(std::chrono::seconds(1)); } void Thread2Fun() { std::thread::id id = std::this_thread::get_id(); cout << "thread " << id << "is running" << endl; ready = true; std::time_t tt = system_clock::to_time_t(system_clock::now()); struct std::tm *ptm = std::localtime(&tt); ptm->tm_sec += 2; std::this_thread::sleep_until(system_clock::from_time_t(mktime(ptm))); } int main() { std::thread t1(Thread1Fun); std::thread t2(Thread2Fun); t1.join(); t2.join(); return 0; }
Mutual exclusion
<mutex> 概要
头文件 <mutex> 分为: mutexes,locks 和一些特殊函数.
具体见之后的Header <mutex> synopsis.
- Mutexes 是lockable types,用来对关键区域代码访问保护:
mutex,recursive_mutex,timed_mutex,recursive_timed_mutex. - Locks 是用来管理 mutex 的对象,并对 mutex 的 lifetime 自我管理:
lock_guard,unique_lock. - Functions 可以同时锁多个 mutexes(
try_lock,lock),并使某个函数只被调用一次(call_once).
Lockable types

BasicLockable
BasicLockable 概念描述了最少特性类型,也就是满足(若 m 是 BasicLockable 类型 ):
m.lock()m.unlock()
所以所有 mutex 都满足 BasicLockable 类型: mutex, recursive_mutex,
timed_mutex, recursive_timed_mutex, unique_lock.
Lockable
Lockable 概念扩展了 BasicLockable 概念,并支持 try_lock.
所以这些 mutex 满足 Lockable 类型: mutex, recursive_mutex,
timed_mutex, recursive_timed_mutex.
TimedLockable
TimedLockable 概念扩展了 Lockable 概念,并支持 try_lock_for 和
try_lock_until.
所以这些 mutex 满足 TimedLockable 类型: timed_mutex,
recursive_timed_mutex.
mutex 类
mutex 类提供了一个不可递归的排它锁.基本接口可以从如下类中参考.
namespace std { class mutex { public: constexpr mutex() noexcept; ~mutex(); mutex(const mutex&) = delete; mutex& operator=(const mutex&) = delete; void lock(); bool try_lock(); void unlock(); typedef implementation-defined native_handle_type; // See 30.2.3 native_handle_type native_handle(); // See 30.2.3 }; }
实例:
#include <iostream> // NOLINT #include <vector> #include <thread> #include <mutex> using std::cout; using std::endl; using std::vector; int g_value = 0; std::mutex count_mutex; void Increase() { const int kLoops = 100; for (int i = 0; i < kLoops; ++i) { count_mutex.lock(); g_value++; count_mutex.unlock(); } } int main(int argc, char *argv[]) { const int kNumThreads = 5; vector<std::thread> threads; for (int i = 0; i < kNumThreads; ++i) { threads.push_back(std::thread(Increase)); } for (auto &thread : threads) { thread.join(); } cout << "value = " << g_value << endl; return 0; }
recursive_mutex 类
namespace std { class recursive_mutex { public: recursive_mutex(); ~recursive_mutex(); recursive_mutex(const recursive_mutex&) = delete; recursive_mutex& operator=(const recursive_mutex&) = delete; void lock(); bool try_lock() noexcept; void unlock(); typedef implementation-defined native_handle_type; // See 30.2.3 native_handle_type native_handle(); // See 30.2.3 }; }
timed_mutex 类
namespace std { class timed_mutex { public: timed_mutex(); ~timed_mutex(); timed_mutex(const timed_mutex&) = delete; timed_mutex& operator=(const timed_mutex&) = delete; void lock(); bool try_lock(); template <class Rep, class Period> bool try_lock_for(const chrono::duration<Rep, Period>& rel_time); template <class Clock, class Duration> bool try_lock_until(const chrono::time_point<Clock, Duration>& abs_time); void unlock(); typedef implementation-defined native_handle_type; // See 30.2.3 native_handle_type native_handle(); // See 30.2.3 }; }
recursive_timed_mutex 类
namespace std { class recursive_timed_mutex { public: recursive_timed_mutex(); ~recursive_timed_mutex(); recursive_timed_mutex(const recursive_timed_mutex&) = delete; recursive_timed_mutex& operator=(const recursive_timed_mutex&) = delete; void lock(); bool try_lock() noexcept; template <class Rep, class Period> bool try_lock_for(const chrono::duration<Rep, Period>& rel_time); template <class Clock, class Duration> bool try_lock_until(const chrono::time_point<Clock, Duration>& abs_time); void unlock(); typedef implementation-defined native_handle_type; // See 30.2.3 native_handle_type native_handle(); // See 30.2.3 }; }
Mutex Exception safety
基本保证: 当 exception 被以上 mutex 的成员函数抛出时,这些 mutex 对象保持有效状态. 如果是 lock 操作被 exception, lock 不会被抛出 exception 的线程所拥有.
抛出的是一个 system_error exception, 导致的基本情况是:
| exception 类型 | error 情况 | 描述 |
|---|---|---|
system_error |
errc::resource_deadlock_would_occur |
deadlock 被检测到 |
system_error |
errc::operation_not_permitted |
线程没有权利做这个操作 |
system_error |
errc::device_or_resource_busy |
native handle 已经被锁 |
lock_guard 类
之前的 mutex 必须写明 lock 和 unlock 调用,如果在 lock 和 unlock 之间产生 exception,那么必须在 exception 处理中不能忘记处理 unlock.当只是在一个关键区域内需要 mutex 保护,使用这样的 mutex 既不方便也容易忘记 unlock 而造成死锁.
引入对之前的 mutex 的封装后的 lock_guard 和 unique_lock ,提供易用性的 RAII-style 机制来获取锁在一段区域内.
lock guard 是一个用来管理一个 mutex 对象,并保持锁住它的对象.
在构造时,mutex 对象被调用的线程锁住,然后在析构时,mutex 被解锁.它是最简单的 lock,并且作为自动作用范围直到它的作用区域结束时特别有用.通过这种方法,它保证 mutex 对象得到解锁即使在 exception 被抛出时.
namespace std { template <class Mutex> class lock_guard { public: typedef Mutex mutex_type; explicit lock_guard(mutex_type& m); lock_guard(mutex_type& m, adopt_lock_t); ~lock_guard(); lock_guard(lock_guard const&) = delete; lock_guard& operator=(lock_guard const&) = delete; private: mutex_type& pm; // exposition only }; }
实例:
#include <iostream> // NOLINT #include <thread> #include <mutex> #include <stdexcept> std::mutex mtx; void PrintEven(int x) { if (x % 2 == 0) { std::cout << x << " is even\n"; } else { throw(std::logic_error("not even")); } } void PrintThreadEvenId(int id) { try { std::lock_guard<std::mutex> lck(mtx); PrintEven(id); } catch (std::logic_error&) { std::cout << "[exception caught]" << std::endl; } } int main() { std::thread threads[10]; for (int i = 0; i < 10; ++i) { threads[i] = std::thread(PrintThreadEvenId, i+1); } for (auto& th : threads) { th.join(); } return 0; }
unique_lock 类
unique_lock 与上面的 lock_guard 基本差不多,同样是 RAII-style 机制来获取锁在一段区域内的对象.
但 lock_guard 非常简单,只提供构造自动拥有锁和析构释放锁,如果需要一些其他的操作,那么就需要更复杂和接口更多的类来处理, lock_guard 能满足如此要求. 它类基本接口如下.
class
namespace std { template <class Mutex> class unique_lock { public: typedef Mutex mutex_type; // 30.4.2.2.1, construct/copy/destroy: unique_lock() noexcept; explicit unique_lock(mutex_type& m); unique_lock(mutex_type& m, defer_lock_t) noexcept; unique_lock(mutex_type& m, try_to_lock_t); unique_lock(mutex_type& m, adopt_lock_t); template <class Clock, class Duration> unique_lock(mutex_type& m, const chrono::time_point<Clock, Duration>& abs_time); template <class Rep, class Period> unique_lock(mutex_type& m, const chrono::duration<Rep, Period>& rel_time); ~unique_lock(); unique_lock(unique_lock const&) = delete; unique_lock& operator=(unique_lock const&) = delete; unique_lock(unique_lock&& u) noexcept; unique_lock& operator=(unique_lock&& u) noexcept; // 30.4.2.2.2, locking: void lock(); bool try_lock(); template <class Rep, class Period> bool try_lock_for(const chrono::duration<Rep, Period>& rel_time); template <class Clock, class Duration> bool try_lock_until(const chrono::time_point<Clock, Duration>& abs_time); void unlock(); // 30.4.2.2.3, modifiers: void swap(unique_lock& u) noexcept; mutex_type *release() noexcept; // 30.4.2.2.4, observers: bool owns_lock() const noexcept; explicit operator bool () const noexcept; mutex_type* mutex() const noexcept; private: mutex_type *pm; // exposition only bool owns; // exposition only }; template <class Mutex> void swap(unique_lock<Mutex>& x, unique_lock<Mutex>& y) noexcept; }
Constructor
在mutex header 概要中可以看到有不同的构造函数,其中一类 unique_lock 构造传入不同的类型:
defer_lock: 不去获取 mutex,只有要和 mutex 一样,手动去 lock 它.try_to_lock: 相当于在构造时,调用try_lock, 不阻塞,之后可通过成员函数bool owns_lock()或直接操作符explicit operator bool() const判断是否获取锁成功.adopt_lock_t: 认为调用的线程已经占有这个锁 m.已经占有这个锁了,为什么要去创建一个unique_lock去包含它呢? 因为可以利用unique_lock中途接手管理这个锁 m, 比如想用 RAII-style 机制管理它,使它 exception safe 等.
这些类型在源代码定义基本如下:
struct defer_lock_t { }; struct try_to_lock_t { }; struct adopt_lock_t { }; constexpr std::defer_lock_t defer_lock = std::defer_lock_t(); constexpr std::try_to_lock_t try_to_lock = std::try_to_lock_t(); constexpr std::adopt_lock_t adopt_lock = std::adopt_lock_t();
余下的构造:
unique_lock();:仅仅创建一个nique_lock对象,不和任何 mutex 相关联.nique_lock(unique_lock&& other);: 通过 other 的内容来构造nique_lock对像,使得 other 不和任何 mutex 相关连联.explicit unique_lock(mutex_type& m);: 通过m.lock()来构造与 m 相关联的unique_lock对象.unique_lock(mutex_type& m, const std::chrono::duration<Rep,Period>& timeout_duration);: 通过m.try_lock_for(timeout_duration)来构造与 m 相关联的unique_lock对象.unique_lock( mutex_type& m, const std::chrono::time_point<Clock,Duration>& timeout_time);: 通过m.try_lock_until(timeout_time)来构造与 m 相关联的unique_lock对象.
实例
利用 defer_lock, 不去获取 mutex, 只创建与它相关联的 unique_lock 对象,之后用 lock() 同时去获取两个锁,防止死锁.
#include <iostream> // NOLINT #include <mutex> #include <thread> #include <chrono> using std::cout; using std::endl; struct Box { explicit Box(int num) : num_things{num} {} int num_things; std::mutex m; }; void Transfer(Box *from, Box *to, int num) { // don't actually take the locks yet std::unique_lock<std::mutex> lock1(from->m, std::defer_lock); std::unique_lock<std::mutex> lock2(to->m, std::defer_lock); // lock both unique_locks without deadlock std::lock(lock1, lock2); from->num_things -= num; to->num_things += num; // 'from.m' and 'to.m' mutexes unlocked in 'unique_lock' dtors } int main() { Box acc1(100); Box acc2(50); cout << "acc1 num = " << acc1.num_things << " ,acc2 num = " << acc2.num_things << endl; std::thread t1(Transfer, &acc1, &acc2, 10); std::thread t2(Transfer, &acc2, &acc1, 5); t1.join(); t2.join(); cout << "after transfer: " << "acc1 num = " << acc1.num_things << " ,acc2 num = " << acc2.num_things << endl; return 0; }
lock_guard VS unique_lock
lock_guard 和 unique_lock 很大程序上很相似,都是 RAII-style 机制来封装一个 mutex 的锁, lock_guard 可以说是 unique_lock 更严格并拥有限制的接口的版本.
如何合适的选择两者的使用呢? 如果 lock_guard 对于情况 A 足够,那么就使用它. 不仅仅是从效率(efficiency)考虑,更是从想要表达的功能(functionality)
考虑. 使用 lock_guard 不仅避免了不需要的其他接口的开销,更是对读代码者表达它的意图,你将永远都不需要解锁这个 guard.
所以你先考虑使用 lock_guard, 除非你需要 unique_lock 的功能. 比如
condition_variable 就需要传入一个 unique_lock 对象.
try_lock 和 lock
template< class Lockable1, class Lockable2, class LockableN... > int try_lock(Lockable1& lock1, Lockable2& lock2, LockableN& lockn... );
按对象 lock1, lock2, …, lockn 从头到尾的顺序尝试去获取每个锁. 如果某个 try_lock 失败, unlock 所有对象并返回. 返回值:
- 成功: -1.
- 失败: 以 0 为起始点的获取锁失败的对象次序数(0 对于 lock1, 1 对于 lock2, ..).
template< class Lockable1, class Lockable2, class LockableN... > void lock( Lockable1& lock1, Lockable2& lock2, LockableN& lockn... );
占有传入的锁 lock1, lock2, …, lockn,使用 防止死锁算饭 来防止死锁.
对于传入对象按照不特定的顺序调用它们的成员函数 lock , try_lock,
unlock ,确保最后所有的锁被获取成功在函数返回时.
call_once
class once_flag; template< class Callable, class... Args > void call_once( std::once_flag& flag, Callable&& f, Args&&... args );
为了让一段代码只被多个线程只执行一次, mutex 文件中中包含了这个保证只调用一次的接口.
once_flag 对象是辅助 call_once 的,作为多个线程共同执行这段的标识,
所以这些个线程必须传入同一个 once_flag 对象.
它并对 exception 做一定的处理,如果 call_once 执行的函数以 exception
退出,那么 exception 会抛给调用者.这次已 exception 退出的执行并不算一次,之后其他函数仍可以继续调用它一次.
如下的实例, t1 和 t2 线程抛出 exception, t3 仍然运行一次, t4 无论是怎样,都得不到运行.
#include <iostream> // NOLINT #include <thread> #include <mutex> using std::cout; using std::endl; std::once_flag flag; inline void MayThrowFunction(bool do_throw) { // only one instance of this function can be run simultaneously if (do_throw) { cout << "throw" << endl; // this message may be printed from 0 to 3 times // if function exits via exception, another function selected throw std::exception(); } cout << "once" << endl; // printed exactly once, it's guaranteed that // there are no messages after it } inline void DoOnce(bool do_throw) { try { std::call_once(flag, MayThrowFunction, do_throw); } catch (...) { } } int main() { std::thread t1(DoOnce, true); std::thread t2(DoOnce, true); std::thread t3(DoOnce, false); std::thread t4(DoOnce, true); t1.join(); t2.join(); t3.join(); t4.join(); return 0; }
Condition variables
<condition_variable> 概要
<condition_variable> 头文件主要包含两个 condition_variable 类, 一个全局函数.
namespace std { class condition_variable; class condition_variable_any; void notify_all_at_thread_exit(condition_variable& cond, unique_lock<mutex> lk); enum class cv_status { no_timeout, timeout }; }
cv_status
Condition variables 与 mutex 之类在等待 timeout 时,返回的不一样,mutex 之类放回 bool 类型, 而 Condition variables 特意为它定义了 enum 类型:
no_timeout 和 timeout, 来判断等待是否成功.
enum class cv_status { no_timeout, timeout };
cv_status::no_timeoutThe function returned without a timeout (i.e., it was notified).cv_status::timeoutThe function returned because it reached its time limit (timeout).
notify_all_at_thread_exit
void notify_all_at_thread_exit(std::condition_variable& cond, std::unique_lock<std::mutex> lk);
<condition_variable> 头文件中有这个函数,它提供机制 notify 其他线程在调用这个函数的线程退出时. 它相当于操作(并包括清理所有 thread_local 对象):
lk.unlock(); cond.notify_all();
虽然可以在调用线程的最后同样调用如上两句代码,但意图没有表现出来,表明
cond 的 notify 必须在线程退出时调用,后面维护者可能会在这之后继续添加代码.
notify_all_at_thread_exit 用一句调用替代两个调用,既不用在函数最后去调用它,而且表明它的意图.
它的操作流程如下:
- 之前获取的锁 lk 的拥有权被转移到 cond 的内部.
- 当此线程退出时, cond 被 notified 通过:
lk.unlock(); cond.notify_all();
Notes
- 如果
lk.mutex()没有被当前线程锁住,调用此函数导致 undefined behavior. - 如果
lk.mutex()的 mutex 不是其他线程使用来等待 condition variable 的同一个的话, 调用此函数导致 undefined behavior.
condition_variable 类
namespace std { class condition_variable { public: condition_variable(); ~condition_variable(); condition_variable(const condition_variable&) = delete; condition_variable& operator=(const condition_variable&) = delete; void notify_one() noexcept; void notify_all() noexcept; void wait(unique_lock<mutex>& lock); template <class Predicate> void wait(unique_lock<mutex>& lock, Predicate pred); template <class Clock, class Duration> cv_status wait_until(unique_lock<mutex>& lock, const chrono::time_point<Clock, Duration>& abs_time); template <class Clock, class Duration, class Predicate> bool wait_until(unique_lock<mutex>& lock, const chrono::time_point<Clock, Duration>& abs_time, Predicate pred); template <class Rep, class Period> cv_status wait_for(unique_lock<mutex>& lock, const chrono::duration<Rep, Period>& rel_time); template <class Rep, class Period, class Predicate> bool wait_for(unique_lock<mutex>& lock, const chrono::duration<Rep, Period>& rel_time, Predicate pred); typedef implementation-defined native_handle_type; // See 30.2.3 native_handle_type native_handle(); // See 30.2.3 }; }
Condition Variable 的基本概念可以从之前篇浅谈 C++ Multithreading Programming中获取.
condition_variable 类的 void wait(unique_lock<mutex>& lock,
Predicate pred); 接口:
- 需要传入
unique_lock. pred函数, 如果 predicate 返回false,等待. 相当于:
while (!pred()) {
wait(lock);
}
实例:
#include <iostream> // NOLINT #include <string> #include <thread> #include <mutex> #include <condition_variable> using std::string; using std::cout; using std::endl; std::mutex m; std::condition_variable cv; string data; bool g_ready = false; bool g_processed = false; void WorkerThread() { // Wait until main() sends data std::unique_lock<std::mutex> lk(m); cv.wait(lk, []{return g_ready;}); // after the wait, we own the lock. cout << "Worker thread is processing data" << endl; data += " after processing"; // Send data back to main() g_processed = true; cout << "Worker thread signals data processing completed" << endl; // Manual unlocking is done before notifying, to avoid // that the waiting thread gets blocked again. lk.unlock(); cv.notify_one(); } int main() { std::thread worker(WorkerThread); data = "Example data"; // send data to the worker thread { std::lock_guard<std::mutex> lk(m); g_ready = true; cout << "main() signals data ready for processing" << endl; } cv.notify_one(); // wait for the worker { std::unique_lock<std::mutex> lk(m); cv.wait(lk, []{return g_processed;}); } cout << "Back in main(), data = " << data << '\n'; worker.join(); return 0; }
condition_variable_any 类
namespace std { class condition_variable_any { public: condition_variable_any(); ~condition_variable_any(); condition_variable_any(const condition_variable_any&) = delete; condition_variable_any& operator=(const condition_variable_any&) = delete; void notify_one() noexcept; void notify_all() noexcept; template <class Lock> void wait(Lock& lock); template <class Lock, class Predicate> void wait(Lock& lock, Predicate pred); template <class Lock, class Clock, class Duration> cv_status wait_until(Lock& lock, const chrono::time_point<Clock, Duration>& abs_time); template <class Lock, class Clock, class Duration, class Predicate> bool wait_until(Lock& lock, const chrono::time_point<Clock, Duration>& abs_time, Predicate pred); template <class Lock, class Rep, class Period> cv_status wait_for(Lock& lock, const chrono::duration<Rep, Period>& rel_time); template <class Lock, class Rep, class Period, class Predicate> bool wait_for(Lock& lock, const chrono::duration<Rep, Period>& rel_time, Predicate pred); }; }
condition_variable_any 是 condition_variable 的一个通用版,它可以等待任何满足 BasicLockable 要求 Lock 类型的对象.其他与 condition_variable
一样.
实例:
#include <iostream> // NOLINT #include <condition_variable> #include <thread> #include <chrono> #include <vector> using std::cout; using std::endl; std::condition_variable_any cv; std::mutex cv_m; // This mutex is used for three purposes: // 1) to synchronize accesses to i // 2) to synchronize accesses to std::cout // 3) for the condition variable cv int g_wait_val = 0; void WaitVal(int id) { std::unique_lock<std::mutex> lk(cv_m); cout << "thread " << id << " Waiting... " << endl; cv.wait(lk, []{return g_wait_val == 1;}); cout << "...finished waiting," << "thread " << id << endl; } void Signals() { std::this_thread::sleep_for(std::chrono::seconds(1)); { std::lock_guard<std::mutex> lk(cv_m); cout << "Notifying..." << endl; } cv.notify_all(); std::this_thread::sleep_for(std::chrono::seconds(1)); { std::lock_guard<std::mutex> lk(cv_m); g_wait_val = 1; cout << "Notifying again..." << endl; } cv.notify_all(); } int main() { std::vector<std::thread> threads; for (int i = 0; i < 3; ++i) { threads.emplace_back(WaitVal, i); } threads.emplace_back(Signals); for (auto& t : threads) { t.join(); } return 0; }
condition_variable VS condition_variable_any
引自 N3690 §30.5[thread.condition]:
Class condition_variable provides a condition variable that can only
wait on an object of type unique_lock<mutex> , allowing maximum
efficiency on some platforms. Class condition_variable_any provides a
general condition variable that can wait on objects of user-supplied
lock types.
condition_variable 只与 unique_lock<mutex> 类型对象关联,在某些平台上,它可以更好的得到特定的优化,如果不需要
condition_variable_any 的灵活性, 选更高效的 condition_variable 对象使用.
Future
<future> 概要
如果要异步的获取一个函数的运行结果, 可以创建一个线程,并利用 Condition
varialbes 来同步线程间使得另外线程正确获取到这个结果. 但 C++11 的
future 库使得这一过程更方便, 它提供接口使程序在一个线程中获取一个在同一个或其他线程中运行的函数的结果(值或异常), (这些类使用并不限制在
multi-threaded 程序中,同样可以在 single-threaded 使用.
future 的概要主要分为:
- 运行函数提供共享结果的 Providers 类:
promise和packaged_task. - 获取共享结果的 Futures 类:
future和shared_future. - Error handling:
future_error,future_errc等. - Providers 提供函数:
async.
Error handling
future_error 类

future_error 类定义对 future 对象非法操作抛出异常的对象类型. 也就是专门为 future 库中接口出现异常提供特定的异常类.
从上图类图可知,这个类继承自 logic_error , 并添加获取 error_code 的成员函数 code , 获取 exception 信息的 what 成员函数.
namespace std { class future_error : public logic_error { public: future_error(error_code ec); // exposition only const error_code& code() const noexcept; const char* what() const noexcept; }; } const error_code& code() const noexcept;
实例:
#include <future> #include <iostream> // NOLINT int main() { std::future<int> empty; try { int n = empty.get(); } catch (const std::future_error& e) { std::cout << "Caught a future_error with code \"" << e.code() << "\"\nMessage: \"" << e.what() << "\"\n"; } }
future_errc
enum class future_errc { broken_promise = /* implementation-defined */, future_already_retrieved = /* implementation-defined */, promise_already_satisfied = /* implementation-defined */, no_state = /* implementation-defined */ };
这个 enum class 定义了 future 抛出异常的error condition. future_errc 的值可以用来创建 error_condition 对象, 并与 future_error 的成员函数
code 返回的值对比, 决定所抛出异常的类型.
所以 <future> 另外有两个函数提供它们之间的转换:
std::error_code make_error_code( std::future_errc e ); std::error_condition make_error_condition( std::future_errc e ); template<> struct is_error_condition_enum<std::future_errc> : std::true_type;
实例:
#include <iostream> // NOLINT #include <future> int main() { std::promise<int> prom; try { prom.get_future(); prom.get_future(); // throws std::future_error with future_already_retrieved } catch (std::future_error& e) { if (e.code() == std::make_error_condition(std::future_errc::future_already_retrieved)) { std::cerr << "[future already retrieved]\n"; } else { std::cerr << "[unknown exception]\n"; } } return 0; }
future_status
enum class future_status { ready, timeout, deferred };
future 和 shared_future 类中属于 wait 类型的接口返回的状态.
- deferred: 返回这个类型是因为共享状态(shared state)含有的一个 deferred 函数.(见async 函数)
future_category
用来识别 future error 种类.
const std::error_category& future_category();
这个函数返回一个 error_category 类型的静态对象,拥有如下特性:
- 它的
name成员函数返回指向字符串”future”的指针.
实例:
#include <iostream> // NOLINT #include <future> int main() { std::promise<int> prom; try { prom.get_future(); prom.get_future(); // throws a std::future_error of the future category } catch (std::future_error& e) { if (e.code().category() == std::future_category()) { std::cerr << "future_error of the future category thrown\n"; } } return 0; }
template promise
模版类 promise 提供一种方便的方法存储一个值或异常,之后可以异步的被 future 对象获取(同一个或其他线程).
promise 对象在共享状态(shared state)存储值的操作 synchronizes-with 在其他函数中成功获取这个共享状态的返回值(如 future::get ).
class
namespace std { template <class R> class promise { public: promise(); template <class Allocator> promise(allocator_arg_t, const Allocator& a); promise(promise&& rhs) noexcept; promise(const promise& rhs) = delete; ~promise(); // assignment promise& operator=(promise&& rhs) noexcept; promise& operator=(const promise& rhs) = delete; void swap(promise& other) noexcept; // retrieving the result future<R> get_future(); // setting the result void set_value(see below ); void set_exception(exception_ptr p); // setting the result with deferred notification void set_value_at_thread_exit(const R& r); void set_value_at_thread_exit(see below ); void set_exception_at_thread_exit(exception_ptr p); }; template <class R> void swap(promise<R>& x, promise<R>& y) noexcept; template <class R, class Alloc> struct uses_allocator<promise<R>, Alloc>; }
set_value and set_value_at_thread_exit
set_value 接口存储值到 shared state,并使 state 准备好.这个操作是原子性的. 而 set_value_at_thread_exit 接口如名字,调用后不会马上设置值到
shared state 中,只在当前函数退出时.
使用 get_future 返回与它相关联同一个 shared state 的 future 对象.
实例:
#include <iostream> // NOLINT #include <functional> #include <thread> #include <future> void Print(std::future<int>& fut) { // (synchronizes with getting the future) int x = fut.get(); std::cout << "value: " << x << std::endl; } int main() { std::promise<int> prom; std::future<int> fut = prom.get_future(); std::thread t1(Print, std::ref(fut)); prom.set_value(10); // fulfill promise t1.join(); return 0; }
set_exception and set_exception_at_thread_exit
这两个接口与上面 set_value 和 set_value_at_thread_exit 一样, 只是保存的是 exception.
实例:
#include <iostream> // NOLINT #include <thread> #include <future> int main() { std::promise<int> result; std::thread t([&]{ try { throw std::runtime_error("Example"); } catch(...) { try { // store anything thrown in the promise result.set_exception(std::current_exception()); } catch(...) {} // set_exception() may throw too } }); try { std::cout << result.get_future().get(); } catch(const std::exception& e) { std::cout << "Exception from the thread: " << e.what() << std::endl; } t.join(); return 0; }
template packaged_task
packaged_task 与 promise 类似,都是提供异步获取值的方法,不同是
promise 直接设置值, 而 packaged_task 封装一个可调用的元素,并把这个可调用任务的返回值异步到 shared state 中.
class
namespace std { template<class> class packaged_task; // undefined template<class R, class... ArgTypes> class packaged_task<R(ArgTypes...)> { public: // construction and destruction packaged_task() noexcept; template <class F> explicit packaged_task(F&& f); template <class F, class Allocator> explicit packaged_task(allocator_arg_t, const Allocator& a, F&& f); ~packaged_task(); // no copy packaged_task(const packaged_task&) = delete; packaged_task& operator=(const packaged_task&) = delete; // move support packaged_task(packaged_task&& rhs) noexcept; packaged_task& operator=(packaged_task&& rhs) noexcept; void swap(packaged_task& other) noexcept; bool valid() const noexcept; // result retrieval future<R> get_future(); // execution void operator()(ArgTypes... ); void make_ready_at_thread_exit(ArgTypes...); void reset(); }; template <class R, class... ArgTypes> void swap(packaged_task<R(ArgTypes...)>& x, packaged_task<R(ArgTypes...)>& y) noexcept; template <class R, class Alloc> struct uses_allocator<packaged_task<R>, Alloc>; }
construct and use
packaged_task 的创建与 thread 类似, 它可以:
- Lambda 表达式.
- Bind 一个函数.
- 直接传入函数.
运行:
- 因为它重载了操作符
(), 可以直接运行如:task(). - 可以
move给一个线程运行.
实例:
#include <iostream> // NOLINT #include <cmath> #include <thread> #include <future> #include <functional> // unique function to avoid disambiguating the std::pow overload set int FunPow(int x, int y) { return std::pow(x, y); } void TaskLambda() { std::packaged_task<int(int, int)> task([](int a, int b) { return std::pow(a, b); }); std::future<int> result = task.get_future(); task(2, 9); std::cout << "task_lambda:\t" << result.get() << '\n'; } void TaskBind() { std::packaged_task<int()> task(std::bind(FunPow, 2, 11)); std::future<int> result = task.get_future(); task(); std::cout << "task_bind:\t" << result.get() << '\n'; } void TaskThread() { std::packaged_task<int(int, int)> task(FunPow); std::future<int> result = task.get_future(); std::thread task_td(std::move(task), 2, 10); task_td.join(); std::cout << "task_thread:\t" << result.get() << '\n'; } int main() { TaskLambda(); TaskBind(); TaskThread(); }
reset
packaged_task 的 reset 接口, 重置状态,舍弃之前运行的结果.相当于: *this = packaged_task(std::move(f)) .
实例:
#include <iostream> // NOLINT #include <cmath> #include <thread> #include <future> int main() { std::packaged_task<int(int, int)> task([](int a, int b) { return std::pow(a, b); }); std::future<int> result = task.get_future(); task(2, 9); std::cout << "2^9 = " << result.get() << '\n'; task.reset(); result = task.get_future(); std::thread task_td(std::move(task), 2, 10); task_td.join(); std::cout << "2^10 = " << result.get() << '\n'; }
template future 类
模版类 future 是用来异步获取共享状态里的结果. future 类是独占的,不能与其他 future 共享异步的获取结果. 若要多个 future 共享异步结果,
使用之后的 shared_future 类.
有效的与共享状态相关联的 future 对象,由如下函数构造:
async.promise::get_future.package_task::get_future.
它的接口:
share: 转换 shared state 从 *this 到一个shared_future对象.get: 返回 shared state 的值, 若未准备好,调用者阻塞等待它准备好.wait: 阻塞等待结果直到有效.wait_for和wait_until: 等待一段时间, 并通过future_status判断等待后的状态.
namespace std { template <class R> class future { public: future() noexcept; future(future &&) noexcept; future(const future& rhs) = delete; ~future(); future& operator=(const future& rhs) = delete; future& operator=(future&&) noexcept; shared_future<R> share(); // retrieving the value see below get(); // functions to check state bool valid() const noexcept; void wait() const; template <class Rep, class Period> future_status wait_for(const chrono::duration<Rep, Period>& rel_time) const; template <class Clock, class Duration> future_status wait_until(const chrono::time_point<Clock, Duration>& abs_time) const; }; }
template shared_future 类
模版类 shared_future 与 future 基本一样, 不同就是多个
shared_future 对象可以共享异步结果.
namespace std { template <class R> class shared_future { public: shared_future() noexcept; shared_future(const shared_future& rhs); shared_future(future<R>&&) noexcept; shared_future(shared_future&& rhs) noexcept; ~shared_future(); shared_future& operator=(const shared_future& rhs); shared_future& operator=(shared_future&& rhs) noexcept; // retrieving the value see below get() const; // functions to check state bool valid() const noexcept; void wait() const; template <class Rep, class Period> future_status wait_for(const chrono::duration<Rep, Period>& rel_time) const; template <class Clock, class Duration> future_status wait_until(const chrono::time_point<Clock, Duration>& abs_time) const; }; }
实例:
#include <iostream> // NOLINT #include <future> #include <chrono> int main() { std::promise<void> ready_promise, t1_ready_promise, t2_ready_promise; std::shared_future<void> ready_future(ready_promise.get_future()); std::chrono::time_point<std::chrono::high_resolution_clock> start; auto fun1 = [&]() -> std::chrono::duration<double, std::milli> { t1_ready_promise.set_value(); ready_future.wait(); // waits for the signal from main() return std::chrono::high_resolution_clock::now() - start; }; auto fun2 = [&]() -> std::chrono::duration<double, std::milli> { t2_ready_promise.set_value(); ready_future.wait(); // waits for the signal from main() return std::chrono::high_resolution_clock::now() - start; }; auto result1 = std::async(std::launch::async, fun1); auto result2 = std::async(std::launch::async, fun2); // wait for the threads to become ready t1_ready_promise.get_future().wait(); t2_ready_promise.get_future().wait(); // the threads are ready, start the clock start = std::chrono::high_resolution_clock::now(); // signal the threads to go ready_promise.set_value(); std::cout << "Thread 1 received the signal " << result1.get().count() << " ms after start\n" << "Thread 2 received the signal " << result2.get().count() << " ms after start\n"; return 0; }
template async 函数
Launching policy for async
enum class launch : /* unspecified */ { async = /* unspecified */, deferred = /* unspecified */, /* implementation-defined */ };
函数 async 有不同的策略来运行函数:
launch::async:创建一个新的线程来调用函数f.launch::deferred:调用函数 f 延迟(deferred)到返回的 future 的 shared state 被访问时(wait 或 get).launch::async|launch::deferred:函数自动选择策略运行.与系统的库实现有关.
async
template <class F, class... Args> future<typename result_of<typename decay<F>::type(typename decay<Args>::type...)>::type> async(F&& f, Args&&... args); template <class F, class... Args> future<typename result_of<typename decay<F>::type(typename decay<Args>::type...)>::type> async(launch policy, F&& f, Args&&... args);
第一个接口没有 policy 作为传入参数, 相当于
async(std::launch::async | std::launch::deferred, f, args...)
实例:
#include <iostream> // NOLINT #include <vector> #include <algorithm> #include <numeric> #include <future> template <typename RAIter> int ParallelSum(RAIter beg, RAIter end) { auto len = std::distance(beg, end); if (len < 1000) return std::accumulate(beg, end, 0); RAIter mid = beg + len/2; auto handle = std::async(std::launch::async, ParallelSum<RAIter>, mid, end); int sum = ParallelSum(beg, mid); return sum + handle.get(); } int main() { std::vector<int> v(10000, 1); std::cout << "The sum is " << ParallelSum(v.begin(), v.end()) << '\n'; }
Header synopsis
<thread>
基本概要如下(§30.3 [thread.threads] of N3690):
// Header <thread> synopsis namespace std { class thread; void swap(thread& x, thread& y) noexcept; namespace this_thread { thread::id get_id() noexcept; void yield() noexcept; template <class Clock, class Duration> void sleep_until(const chrono::time_point<Clock, Duration>& abs_time); template <class Rep, class Period> void sleep_for(const chrono::duration<Rep, Period>& rel_time); } }
<mutex>
// Header <mutex> synopsis namespace std { class mutex; class recursive_mutex; class timed_mutex; class recursive_timed_mutex; struct defer_lock_t { }; struct try_to_lock_t { }; struct adopt_lock_t { }; constexpr defer_lock_t defer_lock { }; constexpr try_to_lock_t try_to_lock { }; constexpr adopt_lock_t adopt_lock { }; template <class Mutex> class lock_guard; template <class Mutex> class unique_lock; template <class Mutex> void swap(unique_lock<Mutex>& x, unique_lock<Mutex>& y) noexcept; template <class L1, class L2, class... L3> int try_lock(L1&, L2&, L3&...); template <class L1, class L2, class... L3> void lock(L1&, L2&, L3&...); struct once_flag { constexpr once_flag() noexcept; once_flag(const once_flag&) = delete; once_flag& operator=(const once_flag&) = delete; }; template<class Callable, class ...Args> void call_once(once_flag& flag, Callable func, Args&&... args); }
<future>
namespace std { enum class future_errc { broken_promise = implementation-defined , future_already_retrieved = implementation-defined , promise_already_satisfied = implementation-defined , no_state = implementation-defined }; enum class launch : unspecified { async = unspecified , deferred = unspecified , implementation-defined }; enum class future_status { ready, timeout, deferred }; template <> struct is_error_code_enum<future_errc> : public true_type { }; error_code make_error_code(future_errc e) noexcept; error_condition make_error_condition(future_errc e) noexcept; const error_category& future_category() noexcept; class future_error; template <class R> class promise; template <class R> class promise<R&>; template <> class promise<void>; template <class R> void swap(promise<R>& x, promise<R>& y) noexcept; template <class R, class Alloc> struct uses_allocator<promise<R>, Alloc>; template <class R> class future; template <class R> class future<R&>; template <> class future<void>; template <class R> class shared_future; template <class R> class shared_future<R&>; template <> class shared_future<void>; template <class> class packaged_task; // undefined template <class R, class... ArgTypes> class packaged_task<R(ArgTypes...)>; template <class R> void swap(packaged_task<R(ArgTypes...)>&, packaged_task<R(ArgTypes...)>&) noexcept; template <class R, class Alloc> struct uses_allocator<packaged_task<R>, Alloc>; template <class F, class... Args> future<typename result_of<typename decay<F>::type(typename decay<Args>::type...)>::type> async(F&& f, Args&&... args); template <class F, class... Args> future<typename result_of<typename decay<F>::type(typename decay<Args>::type...)>::type> async(launch policy, F&& f, Args&&... args); }
其他资料
Books
- Scott Meyers 的 Overview of the New C++ (C++11/14)
Online resources
- Scott Meyers 的Summary of C++11 Feature Availability in gcc and MSVC
- C++11 on cppreference
- C++11 on cplusplus
- Bjarne Stroustrup 的C++11 FAQ
- C++11 Wiki
- C++ standards drafts on GitHub
- C documentation for Thread support library